
arduino
[ Arduino之Ardublock實作筆記 ] 遙控車控制實作 (整合藍芽與紅外線接收模組)

<source : greatway9999>
一、功能描述
(一)、紅外線遙控
按下遙控的前後左右,可讓車子做出 "前進"、"後退"、"左旋"、"右旋"的動作。
按下 "OK"鍵 (或自行選擇合適按鍵來定義),讓車子 "停止",並且蜂鳴器發出旋律。
自行定義兩個按鍵,控制紅燈與綠燈。
(二)、藍芽遙控
動作同上,讓藍芽與紅外線可自由控制。
二、所需材料列表


<圖片來源 : 露天拍賣>
3.蜂鳴器
4.智高Arduino積木組
備註 : 以上圖片來源為隨機在露天拍賣上尋找,非和特定廠商合作。
三、實作分享
(一)、查找紅外線按鈕的對應數字組
請先於此處,下載 <IRRemote>程式庫。並載入Arduino的城市庫,同時記得將原本的 Robot Remote程式庫先移除,避免衝突。
再透過IRrecvDemo這支範例程式,讀取遙控器上各指定按鍵的十進位數字。如下圖。

以我接收到的數字為例 :
前進 : 417813165
後退 : 417845805
...,把這些數字記錄下來,待會要填到程式中。
(二)、撰寫動作指令,以Ardublock為例
1.設定紅外線與藍芽
先宣告一個紅外線數值變數 "IR" ,初始值為0。
接著再將紅外線接收器所接受到的值,存到 "IR" 變數。
宣告一個字元變數 "char" ,並設定讀取序列的值存到 "char" 。作為藍芽模組控制用。
程式撰寫如下圖 :

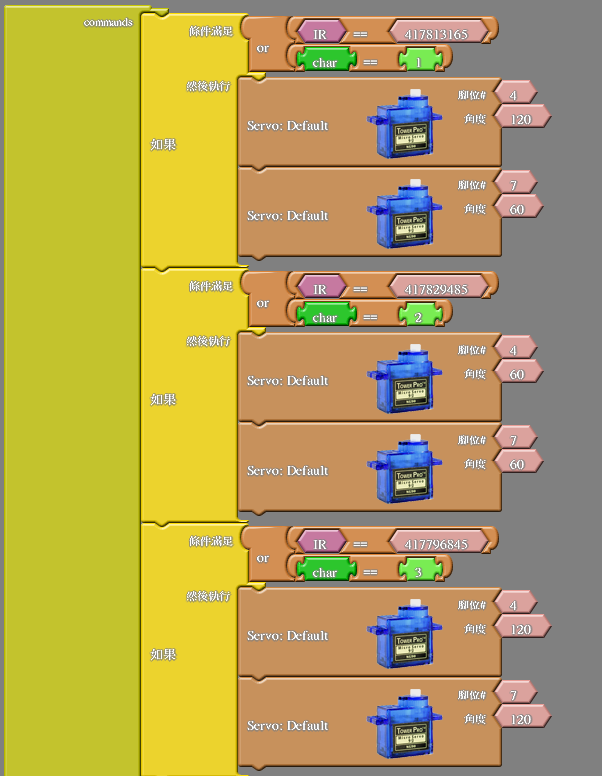
2.定義動作
右馬達接到腳位pin4,左馬達接到腳位pin7。紅燈接到D9腳位。綠燈接到D11腳位。
以 "OR"的方式將讓紅外線與藍芽兩個條件並存。將剛紀錄到的紅外線對應數字組,填到條件中。
若你是使用Android手機,請於Play商店中下載藍芽控制app,同時設定前、後、左、右、停、亮紅燈、亮綠燈。記得這些條件要和紅外線遙控的功能相對應。
最後以副程式的方式呈現。程式碼如下 :

3.將副程式整合到主程式,如下圖。

4.下載 TimeFreeTone模組,並寫入程式
將上述程式的ardublock轉成 ardu C語言,接著下載 TimeFreeTone模組。
下載完後,把TimeFreeTone載入 Arduino 程式庫,再重新開啟。如此將可以在Arduino範例程式中看到TimeFreeTone模組。打開TimeFreeToneExample程式,並將標頭擋、腳位宣告、和旋律程式寫入剛才轉好的 ardu C語言。完成程式如下圖,最後記得要將藍芽的brad rate改成38400。
#include <IRremote.h>
#include <Servo.h>
#include <TimerFreeTone.h>
#define TONE_PIN 10
int melody[] = { 262, 196, 196, 220, 196, 0, 247, 262 };
int duration[] = { 250, 125, 125, 250, 250, 250, 250, 250 };
unsigned long _ABVAR_1_IR = 0UL ;
//libraries at http://www.duinoedu.com/
IRrecv monRecepteur(3);
char _ABVAR_2_char = ' ' ;
Servo servo_pin_4;
Servo servo_pin_7;
void IR_control();
void setup()
{
monRecepteur.enableIRIn();
Serial.begin(38400);
servo_pin_4.attach(4);
servo_pin_7.attach(7);
pinMode( 9 , OUTPUT);
pinMode( 11 , OUTPUT);
_ABVAR_1_IR = 0UL ;
}
void loop()
{
_ABVAR_1_IR = monRecepteur.lireCodeIr() ;
_ABVAR_2_char = Serial.read();
IR_control();
Serial.print("IR=");
Serial.print(_ABVAR_1_IR);
Serial.println();
Serial.print("CHAR=");
Serial.print(_ABVAR_2_char);
Serial.println();
delay( 100 );
}
void IR_control()
{
if (( ( ( _ABVAR_1_IR ) == ( 417813165 ) ) || ( ( _ABVAR_2_char ) == ('1') ) ))
{
servo_pin_4.write( 120 );
servo_pin_7.write( 60 );
}
if (( ( ( _ABVAR_1_IR ) == ( 417829485 ) ) || ( ( _ABVAR_2_char ) == ('2') ) ))
{
servo_pin_4.write( 60 );
servo_pin_7.write( 60 );
}
if (( ( ( _ABVAR_1_IR ) == ( 417796845 ) ) || ( ( _ABVAR_2_char ) == ('3') ) ))
{
servo_pin_4.write( 120 );
servo_pin_7.write( 120 );
}
if (( ( ( _ABVAR_1_IR ) == ( 417845805 ) ) || ( ( _ABVAR_2_char ) == ('4') ) ))
{
servo_pin_4.write( 60 );
servo_pin_7.write( 120 );
}
if (( ( ( _ABVAR_1_IR ) == ( 417857280 ) ) || ( ( _ABVAR_2_char ) == ('5') ) ))
{
servo_pin_4.write( 90 );
servo_pin_7.write( 90 );
for (int thisNote = 0; thisNote < 8; thisNote++) { // Loop through the notes in the array.
TimerFreeTone(TONE_PIN, melody[thisNote], duration[thisNote]);
delay(50); // Short delay between notes.
}
}
if (( ( ( _ABVAR_1_IR ) == ( 417808575 ) ) || ( ( _ABVAR_2_char ) == ('6') ) ))
{
digitalWrite( 9 , HIGH );
digitalWrite( 11 , LOW );
}
if (( ( ( _ABVAR_1_IR ) == ( 417841215 ) ) || ( ( _ABVAR_2_char ) == ('7') ) ))
{
digitalWrite( 9 , LOW );
digitalWrite( 11 , HIGH );
}
}
程式到此結束。
---
相關文章 :
#紅外線接收模組 #bluetooth #IRRemote #TimeFreeTone

![[PLC基礎程式實作筆記] 快速理解自保持狀態 & 程式實作](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjp5L53TvWtTUbakp9zbSS96WyhIQqdGRo9aYZNgc_kJ2U56kw-NNzgkNmKunFi7tS9XQDX7miUsmxvhaOkl56pUR7YsvlSJPwVxYRILiyYrnLT8YQgc3pSkfuc81yC4QwzZv-CV4MM7CcU/w180/%25E8%2587%25AA%25E4%25BF%259D%25E6%258C%2581.PNG)

![[除錯救星] Code::Blocks >> can't find compiler executable in your configured search path's for gnu gcc compiler](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEilxbKOd7yAz3lyOBpMI3jgwZPOkXhtC8xsE_lCc1F0zy3ByRvfrRHR29hacD1LKRNwohxXDty0_aqtdjMQqfpTm1rGNNs-PsOzRVO9gh-2jbE0FwXRjBqVm9sYuevUPX4bVtBxlggJA2z9/w180/error.PNG)
![[ LabVIEW for Arduino ] 6 個步驟,輕鬆完成LabVIEW for Arduino的環境建置](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjtMcc0F0liYVKhv18wsRi9LDRkwEb8GT_TodHixFZaLVKpFtZJz2K6sF4FwQugWfrLx-kKp7lZ8Xe2jQJTnR5iKY1Ek7XgEYoiCNkt9ghXtJEf0FqABo0Nkeu5aQWnle5lhy30u4ZDvAAp/w180/harrison-broadbent-fZB51omnY_Y-unsplash.jpg)
![[OpenCV筆記] 12. 傅立葉轉換實作](https://blogger.googleusercontent.com/img/a/AVvXsEhGtpZu-ujaPIotGxwEygKsrWYP4-s0g-9E3sgef1SZg9X4YdXBK0LIOrFA3usC0jrNbIPGHLr59fTC3DYgTjZZ1xb2XirqydrTWbuou_PfrrxeX4hnZAw8LSiVyCmeT0nVnKiiG_iat_Vt1c18CXY-swzQs6VyOVj0I5bUgL1546G6P2zkItLOfOQDiw=w180)
![[ROS SLAM系列] ROS Melodic中的ORB SLAM2環境建置 與 Stereo SLAM實現](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEilMu37F7nOmxEaj6s9GC6iq224_heJEzcO7Z3eF6I1F7wcymoDT_kSNgEr820lrnI2PQ0LmRgF7ywZvEQlu1SrE4OODGvrTVBhdt7hldKIMeYt4kCvMGnRzeZF8sPpQq56fmVreidJyPs4/w180/23.PNG)
![[LabVIEW程式技巧] 整合練習 : 口罩販賣機軟體設計](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhyhoWfBATSpHetTVdhWTksg3LKJoKtBaA-N9BvrQs8tBo1Q-U7OqZJUV_XvnMlm-qg8v4DDSd0ItZnqs0lKeRBxHHZ8jfKuQzZtQNasziY3B9oPKE-7rJ0Tuxc69ZEgqZ2wW4r5Z4LsUyK/w180/frontpanel.PNG)
![[matlab練習] 實作離散系統之單位步階響應 (差分方程與轉移函數)](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEh793ICAgWLoYehhlcbBRSw9oeK3UbxbuUw-8Re5zxKaMGi91jQPXIHnv2QEYGdVh9Oiq-Ci3enPgcp2d8ym-s90u-p6U8opC548ZyOLDPTxMD58b3fEvCI17yMFt0-WozpcSBr29ww3V56/w180/1.PNG)



![[LabVIEW程式技巧] Event進階功能 - 自定義Event](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEikcy5VNze92W-8E6McMLURWUtTkPAnws44h2BfqMZWuO70d8lsM4A8OZ469ewF7I6Lp3sR9vvtdr5EfsYp8km7WzxLN2g77DqrnStDujaF5bW9e1oxzpqZkx6XSTzAVJMtGICK3LA5Ua2o/w180/finish.PNG)
![[matlab練習]用Simulink實作控制器回授模擬](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEiz3d3sJBigGfbPh4mmovNwnprc3BdRPgx-x4SwpFMgNoGaHV9h3r83EpKIdyAj4EYDuiPAwO4JTrOlWZv-8idcInXup0N4f0rZt9ydsujkhu6t9HulzuwdHXRrlZRsCgmgGj5vVKW2JDg5/w180/1.PNG)
){kind=link}
0 留言