
[OpenCV筆記] 用於角點偵測的 FAST 演算法
1.FAST 演算法簡介
FAST (Features from Accelerated Segment Test) 演算法是由Edward Rosten 和 Tom Drummond 在 2006年的這天論文 "Machine learning for high-speed corner detection" (後來在2010年重新修訂)提出的角點偵測演算法。
為什麼要提出 FAST 演算法呢?因為研究人員發現,雖然許多特徵偵測的演算法有非常棒的效果,但是運用在即時應用的情境中,卻不夠快,無法滿足 "即時" 的需求。
移動式機器人的SLAM應用就是代表性的例子。SLAM(Simultaneous Localization and Mapping) ,即同時定位與建圖。機器人在未知的環境中必須即時偵測環境中的特徵點,才能進一步了解自身的定位並建立地圖,透過自主導航才能進行延伸的應用。
雖然FAST比其他現有的角點檢測演算法快,但取決於閾值,它對抵抗高階雜訊的效果有限。
2.原理
2.1.使用 FAST 進行特徵偵測
Step1.在圖像中選擇一個像素 p ,將其強度設為 Ip。
Step2.選擇合適的閾值 t。
Step3.將像素p周圍的 16 個像素(圓圈上的 16 個像素)納入評估範圍。 (請參見下圖)
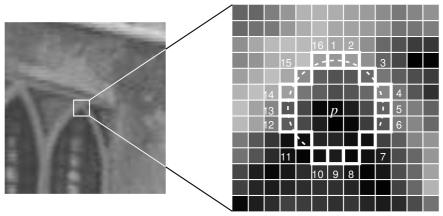
Step4.如果圓圈上的 16 個像素中存在一組 n 個連續像素(n 被設為 12),它們都比 Ip+t 亮,或都比 Ip-t 暗,那麼像素 p 是一個角點。(在上圖中顯示為白色虛線)。
Step5.作者建議進行高速測試以排除大量非拐角。此測試僅檢查 1、9、5 和 13 處的四個像素(首先測試 1 和 9,檢視是否太亮或太暗。如果是,則接著檢查 5 和 13)。如果 p 是一個角點,那麼其中至少3個點必須比 Ip+t 亮或比 Ip-t 暗。通過上述測試的即可作為候選點。這種檢測器本身就表現出高性能,但有幾個弱點:
- 對於 n < 12,它不會拒絕盡可能多的候選者。換言之,候選點可能會很多。
- 像素的選擇不是最佳的,因為它的效率取決於問題的排序和角點外觀的分佈。
- 高速測試的結果被丟棄。
- 多個特徵被檢測到彼此相鄰。
前 3 個弱點可通過機器學習方法解決。最後一個弱點可使用非最大值抑制來解決的。
2.1.1.使用機器學習進行特徵偵測
Step1. 選擇一組圖像進行訓練(最好來自目標應用領域)
Step2. 在每個圖像中運行 FAST 算法以查找特徵點。
Step3. 對於每個特徵點,將其周圍的 16 個像素存儲為一個向量。對所有圖像都使用同樣的方法來得到特徵向量P。
Step4. 這 16 個像素中的每個像素(比如 x)可以具有以下三種狀態之一(如下圖):
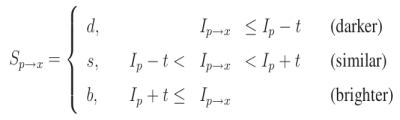
Step5. 根據上述3種狀態,特徵向量 P 被分為 3 個子集,Pd、Ps、Pb。
Step6. 定義一個新的布林(boolean)變量 Kp,如果 p 是角點則為真(True),否則為假(False)。
Step7. 藉由 ID3 算法(決策樹分類器)使用變量 Kp 查詢每個子集,以獲取有關真實類別的知識。以 Kp 的熵進行量測,它選擇產生最多關於候選像素是否是角點的訊息的 x。
Step8. 遞歸(以同樣方法重複)應用於所有子集,直到其熵為零。
Step9. 經此創建的決策樹可用於其他圖像中,進行快速檢測。
2.1.2. Non-maximal Suppression(非極大值抑制)
多個特徵被檢測到彼此相鄰,可通過使用非極大值抑制來解決的。
Step1. 使用得分函數 V,對所有檢測到的特徵點進行計算。 V 是 p 和 16 個周圍像素值之間的絕對差之和。
Step2. 考慮兩個相鄰的關鍵點併計算它們的 V 值。
Step3. 丟棄 V 值較低的那個。
3.範例效果與範例程式碼
3.1. 範例效果
當閾值越大,所偵測到的角點會越少。
而關於非極大值抑制,"fast_true"表示使用非極大值抑制,偵測到的角點會越少。"fast_false"表示未使用非極大值抑制,多個特徵被檢測到彼此相鄰,因此偵測到的角點會較多。
閾值為10

執行程式後的參數輸出結果:
Threshold: 10
nonmaxSuppression:True
neighborhood: 2
Total Keypoints with nonmaxSuppression: 1474
Total Keypoints without nonmaxSuppression: 5623
閾值為30

3.2. 範例程式碼
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('Lenna.jpg',0)
# 使用預設值將FAST物件初始化
fast = cv2.FastFeatureDetector_create()
fast.setThreshold(10) #設定閾值。預設值為10,值越大,偵測到的角點會越少。
# 尋找並繪製關鍵點(角點)
kp = fast.detect(img,None)
img2 = cv2.drawKeypoints(img, kp, None, color=(255,0,0)) #cv.drawKeypoints的參數內容依序為:原圖、角點、輸出圖像、繪製角點之顏色。
# 顯示所有的預測參數
print( "Threshold: {}".format(fast.getThreshold()) )
print( "nonmaxSuppression:{}".format(fast.getNonmaxSuppression()) )
print( "neighborhood: {}".format(fast.getType()) )
print( "Total Keypoints with nonmaxSuppression: {}".format(len(kp)) )
#cv.imwrite('fast_true.png', img2)
cv2.imshow('fast_true',img2)
# 關閉 非最大值抑制
fast.setNonmaxSuppression(0)
kp = fast.detect(img, None)
print( "Total Keypoints without nonmaxSuppression: {}".format(len(kp)) )
img3 = cv.drawKeypoints(img, kp, None, color=(255,0,0))
#cv.imwrite('fast_false.png', img3)
cv2.imshow('fast_false',img3)
cv2.waitKey()
cv2.destroyAllWindows()
---
參考資料:

![[PLC基礎程式實作筆記] 快速理解自保持狀態 & 程式實作](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjp5L53TvWtTUbakp9zbSS96WyhIQqdGRo9aYZNgc_kJ2U56kw-NNzgkNmKunFi7tS9XQDX7miUsmxvhaOkl56pUR7YsvlSJPwVxYRILiyYrnLT8YQgc3pSkfuc81yC4QwzZv-CV4MM7CcU/w180/%25E8%2587%25AA%25E4%25BF%259D%25E6%258C%2581.PNG)

![[除錯救星] Code::Blocks >> can't find compiler executable in your configured search path's for gnu gcc compiler](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEilxbKOd7yAz3lyOBpMI3jgwZPOkXhtC8xsE_lCc1F0zy3ByRvfrRHR29hacD1LKRNwohxXDty0_aqtdjMQqfpTm1rGNNs-PsOzRVO9gh-2jbE0FwXRjBqVm9sYuevUPX4bVtBxlggJA2z9/w180/error.PNG)
![[ LabVIEW for Arduino ] 6 個步驟,輕鬆完成LabVIEW for Arduino的環境建置](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjtMcc0F0liYVKhv18wsRi9LDRkwEb8GT_TodHixFZaLVKpFtZJz2K6sF4FwQugWfrLx-kKp7lZ8Xe2jQJTnR5iKY1Ek7XgEYoiCNkt9ghXtJEf0FqABo0Nkeu5aQWnle5lhy30u4ZDvAAp/w180/harrison-broadbent-fZB51omnY_Y-unsplash.jpg)
![[OpenCV筆記] 12. 傅立葉轉換實作](https://blogger.googleusercontent.com/img/a/AVvXsEhGtpZu-ujaPIotGxwEygKsrWYP4-s0g-9E3sgef1SZg9X4YdXBK0LIOrFA3usC0jrNbIPGHLr59fTC3DYgTjZZ1xb2XirqydrTWbuou_PfrrxeX4hnZAw8LSiVyCmeT0nVnKiiG_iat_Vt1c18CXY-swzQs6VyOVj0I5bUgL1546G6P2zkItLOfOQDiw=w180)
![[ROS SLAM系列] ROS Melodic中的ORB SLAM2環境建置 與 Stereo SLAM實現](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEilMu37F7nOmxEaj6s9GC6iq224_heJEzcO7Z3eF6I1F7wcymoDT_kSNgEr820lrnI2PQ0LmRgF7ywZvEQlu1SrE4OODGvrTVBhdt7hldKIMeYt4kCvMGnRzeZF8sPpQq56fmVreidJyPs4/w180/23.PNG)
![[LabVIEW程式技巧] 整合練習 : 口罩販賣機軟體設計](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhyhoWfBATSpHetTVdhWTksg3LKJoKtBaA-N9BvrQs8tBo1Q-U7OqZJUV_XvnMlm-qg8v4DDSd0ItZnqs0lKeRBxHHZ8jfKuQzZtQNasziY3B9oPKE-7rJ0Tuxc69ZEgqZ2wW4r5Z4LsUyK/w180/frontpanel.PNG)
![[matlab練習] 實作離散系統之單位步階響應 (差分方程與轉移函數)](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEh793ICAgWLoYehhlcbBRSw9oeK3UbxbuUw-8Re5zxKaMGi91jQPXIHnv2QEYGdVh9Oiq-Ci3enPgcp2d8ym-s90u-p6U8opC548ZyOLDPTxMD58b3fEvCI17yMFt0-WozpcSBr29ww3V56/w180/1.PNG)



0 留言