
ROS
[ROS Husky主題實作] 單元2 : 創建畫Husky Car移動軌跡的 Subscriber (訂閱者/節點)

<source : gazebo中的模擬截圖>
一、前言
本系列文章乃依據<clearpathrobotics>進行實作與紀錄。在前篇文章,我們實作了撰寫 Publisher 的技巧。既然有 Publisher,自然會希望有 Subscriber,這樣就可以看到節點進行完整的發布與訂閱動作。接下來,我們將會學習實作一個Subscriber的節點程式,訂閱 Husky Car的里程計Topic,並且畫出移動路徑。
不同以往撰寫程式碼,我們會透過 Github 來獲取所需的套件包。
二、實作解說
(一)、安裝所需工具 Git 和 python-pygame
$ sudo apt-get install git
$ sudo apt-get install python-pygame

(二)、git 工具初始化
Github是開發者常用的版本控制工具之一,大部份的ROS軟體都會連結到Github資料庫。使用者通常會從 Github 的伺服器 "拉" 檔案,修改,然後再將這些修改的內容 "推" 回伺服器。在本次實作中,我們也會練習如何使用Github來 "拉" ROS套件,接下來將會創建一個新的路徑來 "拉" 這些套件。
$ mkdir -p ~/catkin_ws/src/ros101
$ cd ~/catkin_ws/src/ros101
$ git init

(三)、"拉" Gitub 套件
若我們知道套件的 Github 網址,就能輕鬆地從 Github "拉" 套件。指令很簡單,只要 git pull + 網址即可,本例如下 :
$ git pull https://github.com/mcoteCPR/ROS101.git

"拉" 下套件後,我們在 ros101 的路徑上,就會看到 "src" 和 "launch" 資料夾,同時還有 Cmakelsits.txt 和 package.xml。
(四)、撰寫 Subscriber 程式
因為 Github 套件中,已有完整的程式碼,接下來我們只要確認內容是否符合我們的需求,因此透過文字編輯器開啟檔案的指令如下 :
$ gedit ~/catkin_ws/src/ros101/src/odom_graph.py

(五)、編譯套件包
$ cd ~/catkin_ws
$ catkin_make

(六)、啟動與 husky_gazebo 相關的Nodes 和編譯完成的 套件包
$ roslaunch husky_gazebo husky_emepty_world.launch
$ source ~/catkin_ws/devel/setup.bash
$ roslaunch ros101 odom_graph_test.launch
成功畫面如下圖所示,Husky Car會在Gazebo的環境中自主移動,而剛撰寫來記錄移動軌跡的Subscriber python程式將會在另一個名為 "Husky Odom Graph" 視窗執行。
三、有異於範例工作空間名稱的實作紀錄
本系列範例的工作空間為 "ros101",但我們已習慣以 "catkin_ws" 的名稱來進行開發。因此,以上個部分的步驟來進行,到了 "catkin_make" 這個編譯的步驟就會遇到 Error。
只要進行2個小修改,就可以成功編譯。
1.將 Git Pull來的python檔案移到 "random_husky_driver/src"這個資料夾
和C++這種編譯式語言不同,Python是直譯式語言,因此在CMakeList.txt無須作額外的修改。
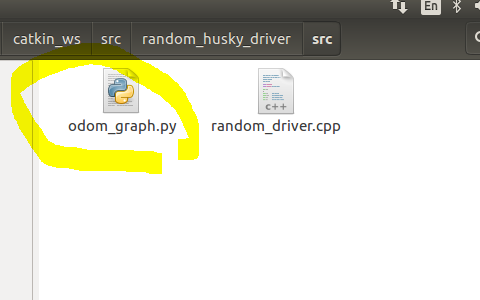
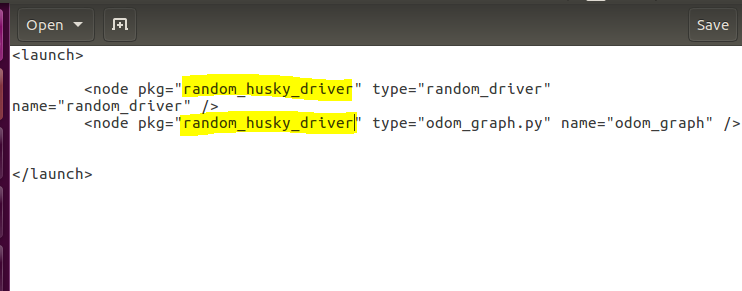
2.將 Git Pull來的launch檔案移到 "random_husky_driver"這個資料夾並修改
放的位置不是在 "src" 內,而是和 "random_husky_driver"的"src"是同一層,如下圖所示。

原本的 package name是 "ros101",記得修改成你的套件名稱。沒改的話,還是會有錯誤。以本文為例,為 "random_husky_driver"。
你可以直接用滑鼠依照資料夾的階層,打開該檔案進行修改。或是用gedit指令,打開檔案修改。
完成上述步驟後,記得將"ros101"整個資料夾刪掉,回到"catkin_ws"再進行編譯。原則上,你就可以成功接到第二部分的第6步驟了。
四、程式碼解說
---
#!/usr/bin/env python
import rospy
from nav_msgs.msg import Odometry
import pygame, sys
from pygame.locals import *
#Initiates the display
pygame.init()
windowSurfaceObj= pygame.display.set_mode((600,600))
pygame.display.set_caption('Husky Odom Graph')
yellow = pygame.Color(245,210,0)
windowSurfaceObj.fill(pygame.Color(0,0,0))
pygame.display.update()
old_x = 300
old_y = 300
#Callback function, draws a line from the last odom point to a new one
def odomCB(msg):
global old_x
global old_y
new_x=int(abs((msg.pose.pose.position.x * 150)))+300
new_y=int(abs((msg.pose.pose.position.y * 150)))+300
pygame.draw.line(windowSurfaceObj, yellow, (old_x,old_y), (new_x, new_y), 2)
pygame.display.update()
old_x=new_x
old_y=new_y
def listener():
rospy.init_node('odom_graph', anonymous=True)
# changed publish to read "husky_velocity_controller/cmd_vel"
# change repairs issues under indigo
rospy.Subscriber("husky_velocity_controller/odom", Odometry, odomCB)
rospy.spin()
if __name__=="__main__":
listener()
---
(一)
import rospy
from nav_msgs.msg import Odometry
載入相關ROS套件。rospy定義了ROS運作基本功能,nav_msgs.msg 則定義和里程計相關的訊息格式。
(二)
def odomCB(msg)
此函示為里程計的返回函式,每當Subscriber接收一個訊息則回傳。此函式定義的內容在上一次座標間讀取里程計位置訊息後,在我們的顯示畫面上畫線。
(三)
def listener()
定義一個listener的節點,"anonymous=True" 意指多個同樣的節點可以在同一個時間執行。
rospy.init_node('odom_graph', anonymous=True)
初始化節點,並讀取名為 "odom" topic的訊息,並呼叫 在odomCB函式接收訊息時呼叫它。
rospy.spin()
讓節點持續工作,直到被關閉。

![[PLC基礎程式實作筆記] 快速理解自保持狀態 & 程式實作](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjp5L53TvWtTUbakp9zbSS96WyhIQqdGRo9aYZNgc_kJ2U56kw-NNzgkNmKunFi7tS9XQDX7miUsmxvhaOkl56pUR7YsvlSJPwVxYRILiyYrnLT8YQgc3pSkfuc81yC4QwzZv-CV4MM7CcU/w180/%25E8%2587%25AA%25E4%25BF%259D%25E6%258C%2581.PNG)

![[除錯救星] Code::Blocks >> can't find compiler executable in your configured search path's for gnu gcc compiler](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEilxbKOd7yAz3lyOBpMI3jgwZPOkXhtC8xsE_lCc1F0zy3ByRvfrRHR29hacD1LKRNwohxXDty0_aqtdjMQqfpTm1rGNNs-PsOzRVO9gh-2jbE0FwXRjBqVm9sYuevUPX4bVtBxlggJA2z9/w180/error.PNG)
![[ LabVIEW for Arduino ] 6 個步驟,輕鬆完成LabVIEW for Arduino的環境建置](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEjtMcc0F0liYVKhv18wsRi9LDRkwEb8GT_TodHixFZaLVKpFtZJz2K6sF4FwQugWfrLx-kKp7lZ8Xe2jQJTnR5iKY1Ek7XgEYoiCNkt9ghXtJEf0FqABo0Nkeu5aQWnle5lhy30u4ZDvAAp/w180/harrison-broadbent-fZB51omnY_Y-unsplash.jpg)
![[OpenCV筆記] 12. 傅立葉轉換實作](https://blogger.googleusercontent.com/img/a/AVvXsEhGtpZu-ujaPIotGxwEygKsrWYP4-s0g-9E3sgef1SZg9X4YdXBK0LIOrFA3usC0jrNbIPGHLr59fTC3DYgTjZZ1xb2XirqydrTWbuou_PfrrxeX4hnZAw8LSiVyCmeT0nVnKiiG_iat_Vt1c18CXY-swzQs6VyOVj0I5bUgL1546G6P2zkItLOfOQDiw=w180)
![[ROS SLAM系列] ROS Melodic中的ORB SLAM2環境建置 與 Stereo SLAM實現](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEilMu37F7nOmxEaj6s9GC6iq224_heJEzcO7Z3eF6I1F7wcymoDT_kSNgEr820lrnI2PQ0LmRgF7ywZvEQlu1SrE4OODGvrTVBhdt7hldKIMeYt4kCvMGnRzeZF8sPpQq56fmVreidJyPs4/w180/23.PNG)
![[LabVIEW程式技巧] 整合練習 : 口罩販賣機軟體設計](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEhyhoWfBATSpHetTVdhWTksg3LKJoKtBaA-N9BvrQs8tBo1Q-U7OqZJUV_XvnMlm-qg8v4DDSd0ItZnqs0lKeRBxHHZ8jfKuQzZtQNasziY3B9oPKE-7rJ0Tuxc69ZEgqZ2wW4r5Z4LsUyK/w180/frontpanel.PNG)
![[matlab練習] 實作離散系統之單位步階響應 (差分方程與轉移函數)](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEh793ICAgWLoYehhlcbBRSw9oeK3UbxbuUw-8Re5zxKaMGi91jQPXIHnv2QEYGdVh9Oiq-Ci3enPgcp2d8ym-s90u-p6U8opC548ZyOLDPTxMD58b3fEvCI17yMFt0-WozpcSBr29ww3V56/w180/1.PNG)



![[ LabVIEW實作 - NI myRIO基礎篇 ] 用Enum實現七段顯示器的 4 種情境 (手動點選、反轉、計數、點擊加一)](https://blogger.googleusercontent.com/img/b/R29vZ2xl/AVvXsEgzaYyTe9kzoq_THDISA6q7QgSf3GgGrN5t08MfYk8eBjE71PR8pUdEIL98TXNeOnyy4luSmsMKtnwIc0dnoHTC-WfMS8CfxpH3uTp5Z4n_LvClKnj6ATfEZw-LVva_TBedFwSCdiUdzljD/w180/harrison-broadbent-5HslSie_BNQ-unsplash.jpg)
){kind=link}
0 留言